NESSUS Hybrid FORM - Importance Sampling
NESSUS First-Order Reliability Method [1]
First-Order Reliability Method (FORM) searches for the Most Probable Point (MPP) and then computes the reliability based on an approximation to the limit state at this point. Unlike the MV or AMV+ methods FORM actually operates in transformed standard normal u-space. FORM works with trying to approximate the g-function by simple linear function. FORM generally computes probability in less than 200 model evaluations for 8 design variables. This method should not be used with discrete design variables or discrete response variables. Multiple local MPPs may induce error in the probability estimation by this method and that error tends to be most pronounced for large probabilities of failure.
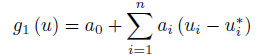
The FORM probability solution is based on the linearization of the g-function at the MPP in the u-space. The first-order polynomial g1(u), is:
Given g1(u), the probability of failure is a function of the minimum distance to the plane defined by g1 in the u-space:
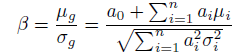
where  is computed from
is computed from
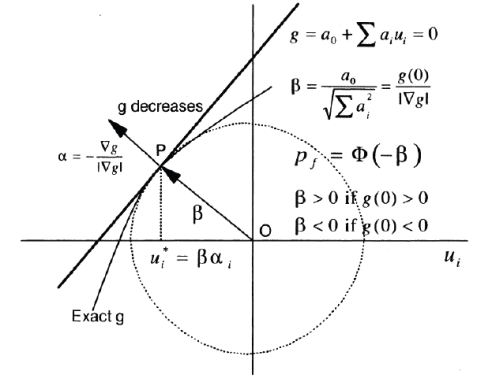
which is allowed to take negative values. A negative means the origin is in the failure region (i.e., for the case of pf > 0.5). The following figure shows FORM results and all details:
Importance Sampling
Importance sampling methods seek to improve the efficiency of probability estimates by focusing the samples in the important region of the design space, where failure is more likely to occur. Particularly for small probabilities of failure, basic Monte Carlo sampling can require a very large number of samples, because the vast majority of the samples will lie in the safe region. Importance Sampling concentrates the sampling points in the region of most importance. Importance Sampling can be orders of magnitude efficient than Monte Carlo.
CENTAUR provides two importance sampling methods, which are based on the concept of shifting the importance density to the Most Probable Point (MPP) of failure. These are the basic Importance Sampling (IS) method, and the Multimodal Adaptive Importance Sampling (MAIS) method.
The basic importance sampling method defines a new importance density  . The probability of failure is then estimated by:
. The probability of failure is then estimated by:
where I(x) is the indicator function, which is equal to 0 for safe points and 1 for failed points, and  is the original PDF of the inputs.
is the original PDF of the inputs.
Many different choices of the importance density, , have been proposed. The CENTAUR IS method defines the importance density by shifting the mean of the inputs to the MPP, while the input variances are not changed. This is illustrated in Figure 1, which shows a comparison of basic Monte Carlo sampling and MPP-centered importance sampling for a simple limit state with two random variables. Before collecting the importance samples, the MPP must first be determined, which is done using either the Advanced Mean Value or First Order Reliability Method.
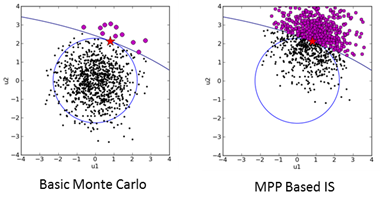
Figure 1. Comparison of basic Monte Carlo and MPP-based Importance Sampling.
The variance and coefficient of variation (COV) of the importance sampling probability estimator  can be estimated by computing the sample variance of the summand. This provides the following estimate of the sampling variance:
can be estimated by computing the sample variance of the summand. This provides the following estimate of the sampling variance:
and the COV is by definition:
Notice that the COV is a function the failure probability, the sample size, and the importance density. The COV can be used as an error estimate or as a convergence criterion to determine the number of samples necessary to achieve a given error requirement. By approximating the sampling distribution as a normal distribution, approximate error bounds can be obtained on the true failure probability. For example, at the 95% confidence level, the confidence interval for pf is:

Control Parameters
| Name | Default Value | Description |
|---|---|---|
| Samples | 50 | This option sets the number of samples to be used in each iteration in the importance sampling. |
| MaxSamples | 1000 | This option sets the maximum number of samples in the importance sampling. This does not include the number of evaluations needed to locate the MPP. |
| Convergence Tolerance | 0.05 | Coefficient of Variation is used as a convergence tolerance. Coefficient of variation is the ratio of standard deviation of probability of failure to that of probability of failure (in this case estimated probability of failure). The smaller the value of coefficient of variation, more accurate is the estimate of probability. This option can take value between 0 and 1 and is advisable to have a value between 0.01 and 0.2. |
| Finite Difference Step Size | 0.01 |
This option is used to calculate finite difference step size. The step sizes are determined based on the value of this option multiplied by the mean value of the design variable. Thus if the mean value of the design variable was 5 and the finite difference step size option had the value of 0.1, the actual step size would be 0.1*5 = 0.5. The step size is used by the underlying optimizer trying to locate the MPP. The option expects a value typically within 0 and 1. |
| Seed | N/A | The seed sets the starting point for the random number generator used with importance sampling. If running multiple tests, keep this value the same if all else is constant. If left blank, Analyzer will generate its own. |
References:
1. NESSUS Theoretical Manual, February 17, 2012, Section 3